V2 Chapter 15
Details
71. Yet Another Rotor Repair and Software Development(2005 -07-25 to Present)
2005-08-20 A new YAM is on order (this one looks big enough to twist the antenna down to a stump) and will be delivered next week. In the interim I have been working of the Remote Client and Server. A test today showed that the integrated software worked OK but several users reported that 'holes' appeared in the audio stream. I think this is because of network congestion and retry timeout logic that comes with TCP (the protocol in use for this test) and that switching to UDP might solve that problem. UDP doesn't have any retry logic in it and is therefore better suited for this type of broadcast.
Initial tests of UDP seem to show and improvement in the dropout rate but, for some reason, the client simply quits after receiving exactly 179 seconds worth of data. I'm looking into this.
2005-08-12 - More bad news. The motor I installed cannot turn the antenna. It looked strong enough (I know, I know that's not a good way to do it) but it wasn't. Now I have to bring the rotor back down and start searching for YAM.
2005-08-11 - I have had some success in the YARR (Yet Another Rotor Rebuild) and have the motor mounted inside the rotor case and the whole thing back on the pole. I have a new limit switch system that 'should' preclude running through the stops like the last time but we will see. Today I will close up the rotor and lift the antenna back into place. I'm also going to take another look at the LNA and filter switch as it doesn't seem to be working.
I also had to replace the TV camera that monitors the antenna movement. The camera is a necessity especially during testing after a YARR. This time I replaced it with a low light color camera from Fry's Electronics ($40 - how do they manage to build and sell it at that price) and a video capture card. The car will go into the Remote Server computer and will be used to present a picture of the antenna position as you move it remotely.
As they say "Stay Tuned for further developments".
2005-08-08 - A YAM came in today that seems like it will work. This one is a Merkle-Korff

I'm going to install it in the rotor housing and hope for the best.
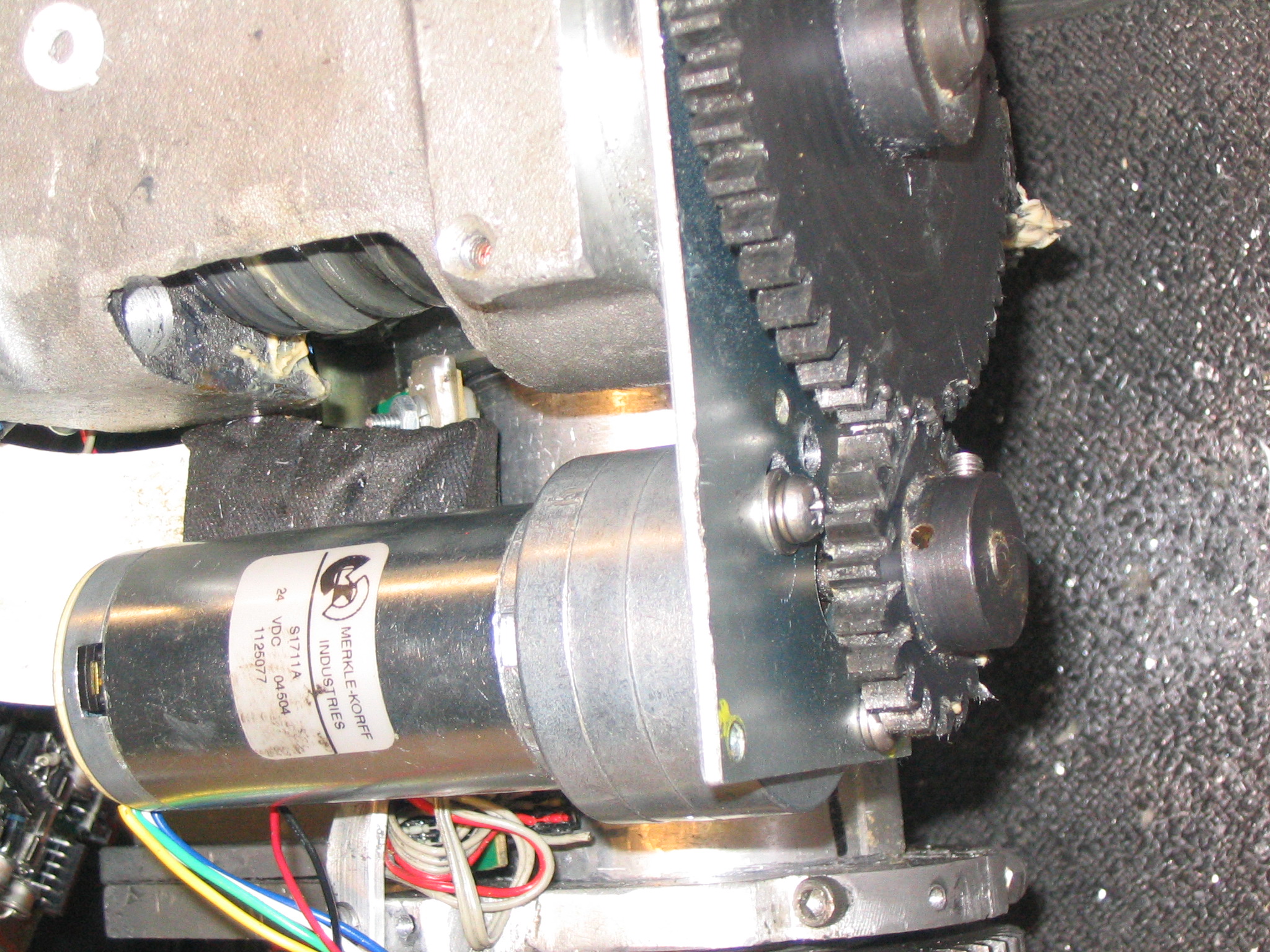 Motor During installation
Motor During installation
First order of business was to compensate for the difference in diameter between the motor shaft and the gear. This was done with a piece of brass tubing slit down the middle with a hacksaw and jammed into the drive gear. Then the excess was taken out with a Dremle grinder. After a couple of hour of work - its installed.
| Encoder Wiring | This is for reference |
| Blue | Vcc 5 Volts |
| White | Output Phase A |
| Green | Ground |
| Yellow | Output Phase B |
It seems to move the big gear and the worm gear after that fine so I'll go ahead with it.
2005-08-07 - A lot of YAMs were tried over the last couple of weeks (Yet Another Motor) including two that I bought from ebay and three that I bought from local surplus dealers - non came close to working. I have an interim version of the Remote SETI Client software available for download now. This is a 'work alike' of the last version with a rudimentary receiver control page. Please download it and give it a try.
 I have one on order from an ebay dealer that looks like it might be the right
one. It has a shaft encoder built in and the drive shaft seems to be the
right size (pix on the left).
I have one on order from an ebay dealer that looks like it might be the right
one. It has a shaft encoder built in and the drive shaft seems to be the
right size (pix on the left).
2005-07-29 - I am diligently working on the next version of the Client/Server software for Remote SETI while I wait for delivery of my eBay purchased rotor motor. I almost broke my pick trying to figure out how to create a 'Struct' in XML-RPC and then to fill it with the needed parameters. After creating the struct and sending it to the server I almost broke my pick again attempting to unwind it for use. But I did manage it. The details are found in:
C:\Program
Files\Borland\DelphiTools\XML-RPC\dxmlrpc-2.0.0\demos\delphi\client\SETI Test
and
C:\Program Files\Borland\DelphiTools\XML-RPC\dxmlrpc-2.0.0\demos\delphi\server\SETI Test
If anyone is interested I can zip up these two Delphi projects and send them out.
Now that I know how to do this basic bit of XML-RPC magic I can proceed with the development of the software.
2005-07-25 - This is bad. The azimuth rotor motor has broken and needs to be replaced but no replacements are available.
It happened while I was traveling. I left the antenna in the on-line mode and for some reason one of the clients managed to move it against the hard stop. The motor kept trying to move, in the wrong direction, and stripped a gear in the motor.
 Down
from the pole and on my bench
Down
from the pole and on my bench
 Removing the Az rotor motor
Removing the Az rotor motor
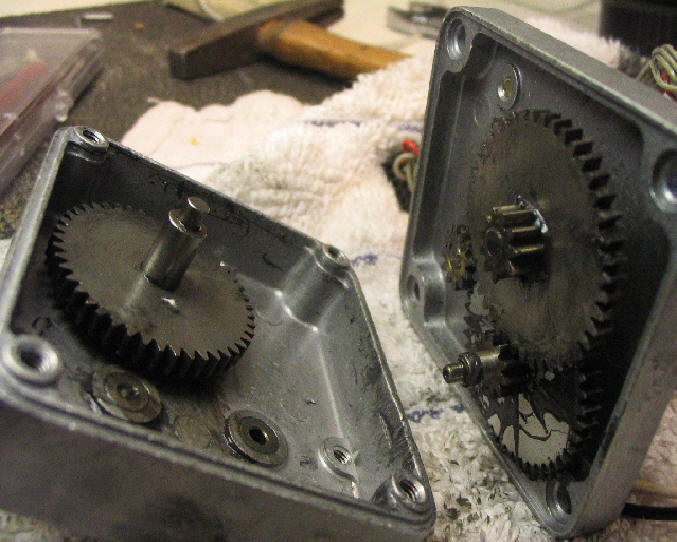 Rotor
motor gear head open
Rotor
motor gear head open
I need to find either a whole assembly like this or a gear head that is close enough to work.
Does this look familiar to anyone? The project is dead until I can find a replacement.
70. New Client/Server construction (2005 -07-12 to 2005 -07-23)
2005-07-12 Although testing of the streaming audio client didn't get much of a workout (three Argus members tried it and all three were able to hear the tone) I decided to go ahead with the next phase of the Remote SETI Client/Server. The following is what I expect to accomplish in this phase:
- RSL - Develop the full Syntax and Semantics of a Remote SETI Language (RSL) for control of this (or any other) Remote SETI station.
- Client/Server - Implement the RSL and release it for testing
- Rotor - Perform YARR on the blasted thing.