V1 Chapter 6
Receiver chirping and the decision covering receiver integration is covered in this chapter. Also contains one of those rare items - an epiphany
I must look for myself
Details
34. Chirp (1/13/2002 to 1/15/2002) 
One method used to distinguish signals that originate off the earth is to make use of the Doppler shift caused by the rotation of the earth. This is how that works.
First - Think of the earth in its real position with the north pole pointed to your actual north. Throw away your lifelong idea that the North pole is up (its not - never has been). As I look out my window with a due east view I think of the north pole to my left and the earth turning toward the east.
If you suddenly feel a sense of nausea when your brain kicks into this idea you are experiencing a paradigm shift (without a clutch). A second paradigm shift occurs when you think of the orientation of the galaxy. 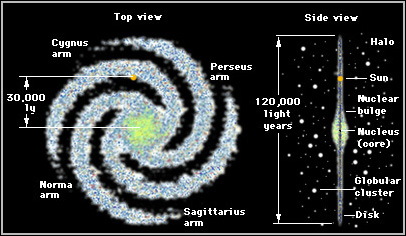
Next - Think of an ET signal coming in from a star that is on the eastern horizon. Since the earth is turning toward that signal it will be Doppler shifted up in frequency. If we train our antenna on that star and track it during the day (remember this search runs fine during the day) the star will rise until right overhead. The Doppler shift will then be at a minimum. If we keep tracking the star toward the west the shift will become more and more negative until the star sets in the west.
On our waterfall display this would result in sort of a 'S" line. Using this as a detection method means that all 'S' curved signals have a good chance of being from some where other than earth.
I could write software to search for these 'S' signals but doing so would be a difficult task. A better solution is to move the receiver frequency in step with the Doppler. Up in frequency when pointed East, Down when pointed West. The resulting 'chirp' of the received signal causes it to become a 'I' rather than a 'S' and is much easer to write software for. All local signals then move like 'S' and can be ignored.
The calculation for the chirp frequency is:
| This is a section of Delphi code that calculates the needed chirp of the receiver. This same calculation can be found in the SETI League's web site in Excel format. All SETI Net software is available in the Operation section. |
| (* C h i r p T i m e r E v e n t *) procedure TfrmWiNRADiO.timerChirpTimer(Sender: TObject); var dfdt: Real; // Change in receiver frequency each minute. HzPerSec: Real; // Change per second Fd: Real; // Doppler shift due to the earth's rotation begin Fd := Fo * K * Cos(DegToRad(SETINetLat)) * cos(DegToRad(DEC)) * Sin(DegToRad(HA)); dfdt := Fo * K * Cos(DegToRad(SETINetLat)) * cos(DegToRad(DEC)) * Sin(DegToRad(HA + 0.12535)) - (Fo * K * Cos(DegToRad(SETINetLat)) * cos(DegToRad(DEC)) * Sin(DegToRad(HA - 0.12535))); HzPerSec := dfdt / 60; NextFo := NextFo + HzPerSec; if (Trunc(NextFo) <> Fo) then begin Fo := Trunc(NextFo); SetRadioFreq(Trunc(Fo)); end; end; |
This code runs every second during tracking operations. When the Next Frequency (NextFo) becomes larger than the current frequency the receiver is changed to the new frequency.
In practice the NextFo is +0.13 Hz/sec when pointed due East and -0.13Hz/sec pointed due West. When pointed either North or South the Doppler is zero.
33. Selection of Integration Method (1/15/2002 to 3/1/2002)
Integration of the incoming signal is one of the techniques to bring a very small signal up out of the noise. When I run the Scanner portion of the software I get a lot of noise along with the signal I'm looking for. This picture shows a 20 KHz section of the waterhole with a signal in bin 180 to 190. The signal is the Weak Signal Source running at 1420.395189 that I use as a test beacon.
This display has a lot of noise on it and the resulting waterfall does not show a crisp line where the beacon is running. This is not right.
Waterfall with Weak Signal Source
The WSS line is very difficult to see because of the lossy jpg image you get over the internet but in person you can see the line but, even in person, its not good enough. Integration of the signal should help.
The integration problem makes you think about the kind of signal your looking for. For example I think the signal will be a narrow band beacon with on/off modulation (see Epiphany Of The Day - below). Since integration tends to highlight signals that are on all the time and hide signals that are closer to noise the length of time that I integrate must be carefully selected. A signal that drifted from one bin to another in the FFT would be lost in the noise. A signal that was keyed on/off in a regular pattern would also be lost in the noise.
To make these signal loss factors as small as possible the system changes the receiver frequency to exactly counteract the Doppler caused by the earths rotation this keeps any signal in as small a number of bins as possible and the integration time is kept short enough so that an on/off signal will still show up.
The following describes the basic search philosophy slowly coming to the front as I design various parts of the system.
Epiphany Of The Day |
After looking at the software and hardware requirements for my Project Argus station, and mulling over such technical questions as integration time constant and Doppler shift correction, I have come to the following epiphany: I must look for the most obvious signal - and that is the signal that I would choose to send myself, if I had the money to do so. What that means (and it seems obvious once put on paper) is that: I must look for myselfAny ETI that I might hope to detect must be more like myself than unlike me, in most basic ways. Not to put too fine a point on it, but, for example, I think this ET would think in the same time frame as we do. Not at the speed of a glacier or at the speed of bullet, but somewhere near our 'thinking speed'. This is necessary to make the signal recognizable to us when finally detected. ET's physical makeup would have to be about the same as ours. Not as small as a bacterium or as large as one of the rolling hills I can see from my window, but somewhere in-between. This would give him the same type of control over his environment, and the same capability as I have to construct the needed transmitter, which could produce a signal which I can recognize. Not all ETI need be like me; only those who I have a realistic chance of detecting. ETI's transmitter must be an RF signal generator. Some other, more exotic form of communication may well be in use, but since I can't construct a receiver to detect exotica, it's not worth considering. This leaves open optical SETI - but not for me. I know nothing about the optics required on that scale. As a microwaver, I'll stick to the area where I have a shot at SETI success. The signal must be a deliberate beacon. That's the only type I and most other Argus stations would have a ghost of a chance of hearing. Leakage detection seems less likely, if only because of the transmit power requirements needed to show up on my system. Detecting planetary Radar also seems unlikely, because it seems that it would only be sent for short periods. Once a radar echo was recovered, the transmitter would most likely be turned off or pointed somewhere else. The modulation scheme needed for an effective Planetary Radar might also make it difficult to recognize on this end. I would set my beacon up in the waterhole to maximize its chances of discovery. I would want to be heard, and that is the most obvious place to start. The hydrogen line is at 1420 MHz and the hydroxyl line at 1662 MHZ. I would transmit at exactly 1/2 way between the two at 1541 MHz. (One could also make a case for the geometric mean of the hydrogen and hydroxyl lines, which is 1536 MHz. But we're splitting hairs here.) I would expect ETI to similarly transmit somewhere near the middle of the waterhole, if he wants me to detect him. Unfortunately, my Project Argus system (receiver and filter) can't tune this frequency, but if I were to make changes to my system, that is where I would choose to monitor. An ideal interstellar beacon should be narrow band to concentrate the transmit power, and to make it distinguishable from natural sources. It must be directed at our star. This is necessary to conserve power, and to make possible reception over huge distances. So a directed beacon is what I am looking for. I can see ETI pointing such a beacon at each candidate star, one at a time, sending the beacon for some length of time, and then moving to the next star. The above targeted beacon strategy implies that earth rotation Doppler compensation is a minimum requirement of our Project Argus receiving stations, if only to exclude local signals. Correcting for the Doppler shift due to our travel around the sun is also a requirement. I have the earth rotation Doppler chirp running now - the other compensation is an unknown quantity to me at this point, but something which Project Argus participants should be working on. My hypothetical interstellar beacon would be locked onto each star for about a year at a time. We may have missed ETI's signal already, and may have to wait another 300 Billion years for it to show up again. Or, it may be starting tomorrow. Since we just don't know, we may as well assume that it starts tomorrow. If I were sending a beacon, its transmitter frequency would be Doppler-adjusted to the Galactic center of rest. Since the purpose of a beacon is to be seen against a background of other signals, this would make it clear to anyone receiving it that it was an intentional signal. Again, I have no idea how to design this correction into my receiver chirp. If it's small (less than about 0.01 Hz/sec), no matter where I point my antenna I can't use it anyway, because my 10Hz/Bin resolution and planned 30-minute integration time constant make such small Doppler rates moot. If the compensation for the Galactic center of rest is a seizable fraction of a Hz per second, I'd better figure out how to implement it! My beacon would be a CW signal on/off modulated in a regular way. I might send Morse code in a repetitive pattern, and I would send it at a speed slow enough to allow integration of each character, but not so slow as to allow the signal to drift across many bins during a given key-down period. If I concentrate on looking for myself, I may well miss signals sent by those not like me. But I know that creatures who think like me exist (if only by Earth's own example.) Designing our search around those not like us involves pure speculation, and may reduce our chances for SETI success. |
I got a good example of what over integration can do today. I have a small oscillator that I use as a test beacon (the SETI League Weak Signal Source) and it runs day and night so that it will be as stable as possible. Today it started drifting. In a 30 minute run its waterfall line moved about 10 bins, that's about 100 HZ, up band. At the end of the integration period it simply disappeared - averaged right out of the picture.
I hope it wasn't my receiver moving down band because I don't have much of a hope if it was. If it was the WSS I can work on stabilizing its frequency a bit.
The point is that if you integrate past the capabilities of you equipment you may loose your signal not gain it.
Since I think of the earth north pole actually pointing north the old image of the solar system must likewise be revised.
 Solar system as I think of it.
Solar system as I think of it.
Now that small blue marble, the earth, is in its proper place it and the rest of the planets are wheeling and looping around the sun.

Our Galaxy - The Milky Way. About 300,000,000,000 stars and (my guess) about the same number of habitual planets.
The core idea of the SETI Search:
With 300 Billion or more planets in just our galaxy there must be many that are already communicating with each other and would like company. We live in one of the outer arms of the Milky Way in a rather out of the way spot but would welcome company as well.